直線追跡の一般な場合
アルフレッド・ロトカ(Alfred J. Lotka)は、[1] の中で追跡問題を違った角度から見ており、彼のその結果は直線追跡の一般的な問題に応用できる。論考の背景
ある種の生物 P1 はある生物 P2 の獲物となる、が後者に ρ 離れた所で存在を知られると、D 離れた一番近い隠れ処や安全地帯へ即座に真直ぐに逃げる。
生物 P1の捕獲あるいは逃走の基準は?
これは標準の直線追跡問題で特別なことはない。
追跡者と逃走者のペアは犬とうさぎ、クモとハエ、孔雀と蛇、等で行うことができる。
しかし[1] では、少し違った方法で疑問を持ち出している。
条件:
P1 は逃走者で一定の速度v1で真直ぐにP1O に移動する。
質問:
P2 は追跡点で常に一定の速度 v2 で P2P1 方向に移動する。
もし v2> v1 とするならば、最終的に P2 は点 O で P1 に追いつく。
点 O は捕獲地点である。
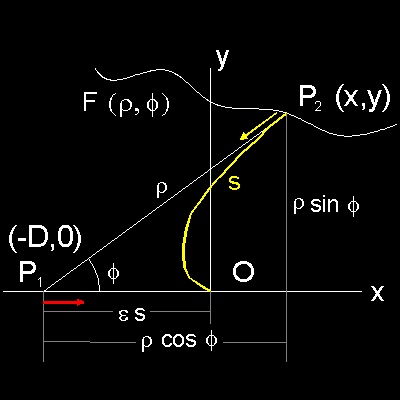
******* ellipse_derivation_1.dwg ********
比率を v2 / v1= e で、方向を v1 で与えるとき、
点O で捕らえるまでの時間t に関する追跡点の軌跡は?
次の微分方程式はF.R.Sharpe教授の功績である。
x = -εs + ρcos(φ) y = ρsin(φ)
(φ は∠P2 P1O, 及び ρ は 半径ベクトル P1 P2)
微分を取ると:
(dx/ds) = -ε + (dρ/ds)cosφ - ρsinφ (dρ/ds) = -cosφ
(dy/ds) = (dρ/ds)sinφ + ρcosφ(dρ/ds) = sinφ
これを解くと
(dρ/ds) = 1 + εcosφ
ρ(dρ/ds) = ε sinφ
よって
(1- εcosφ)(dρ/ds) + ε ρ sinφ(df/ds) = 1 - ε2
積分すると
(1- εcosφ) ρ = (1 - ε2)s
これは離心率 ε を有する楕円の方程式で、
s は長半径の長さ(通常"a"で表される)。
D は中心から焦点までの距離 D = ε a である。
一般直線追跡問題の解
この結果を、より一般的な直線追跡問題の答えに用いる。
一般問題:
餌食は点"F" (-c, 0)にいる、点"O" (0,0)は確実に安全な場所である。
餌食の逃走スピードはv1である。
餌食が捕食動物を点"P" (x,y)で見つける、捕食動物はv2の一定速度で走る。
餌食と捕食動物が、餌食は点"O"へ向けて、捕食動物は餌食の方向へ走り始める。
v2 > v1である時、逃走と捕獲の基準は何か?
答え:
点P が楕円の外側の場合、捕獲は起らない。
長半径 a= (v2/v1)c で、片方の焦点が F である楕円を描く。
どのように?
1. 図:中心F で半径a の円を描く。これが正方向のy-軸をB で交差する。
OB = b (長半径) a と b の値を用いて楕円を描く。
2. b を計算する。 b = a (1 - ε2)1/2 (但し ε = v1/v2)
逃走の例
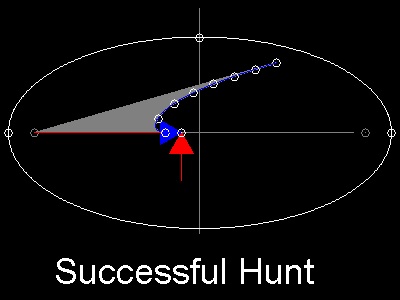 犬が楕円の内側の場合、うさぎが安全な穴に到達する前に捕獲できる。
犬が楕円の内側の場合、うさぎが安全な穴に到達する前に捕獲できる。
********** successful_hunt.dwg ***********
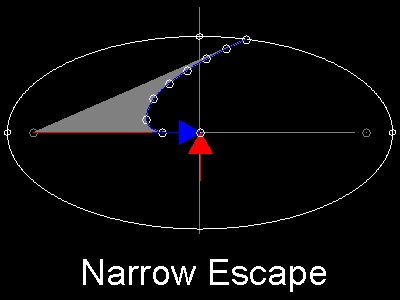 犬が楕円上の点から追いかけ始めると、
犬が楕円上の点から追いかけ始めると、
犬は うさぎが安全な穴に逃げ込むところでうさぎのかかとに追いつく。
ギリギリ逃げ切り成功!!
********** narrow_escape.dwg ***********
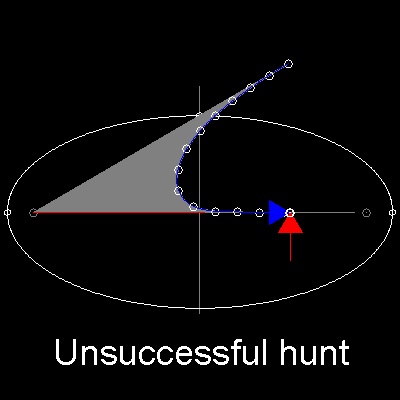 犬が楕円の外側から追いかけ始めると、
犬が楕円の外側から追いかけ始めると、
うさぎが穴にいるまでには捕まえきれない。
********** unsuccessful_hunt.dwg ***********